网站首页
关于伟豪思
产品中心
客户案例
资讯中心
视频中心
资质荣誉
联系伟豪思
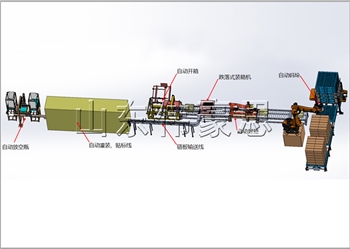
纸箱全自动码垛机
左右滑动查看更多图片
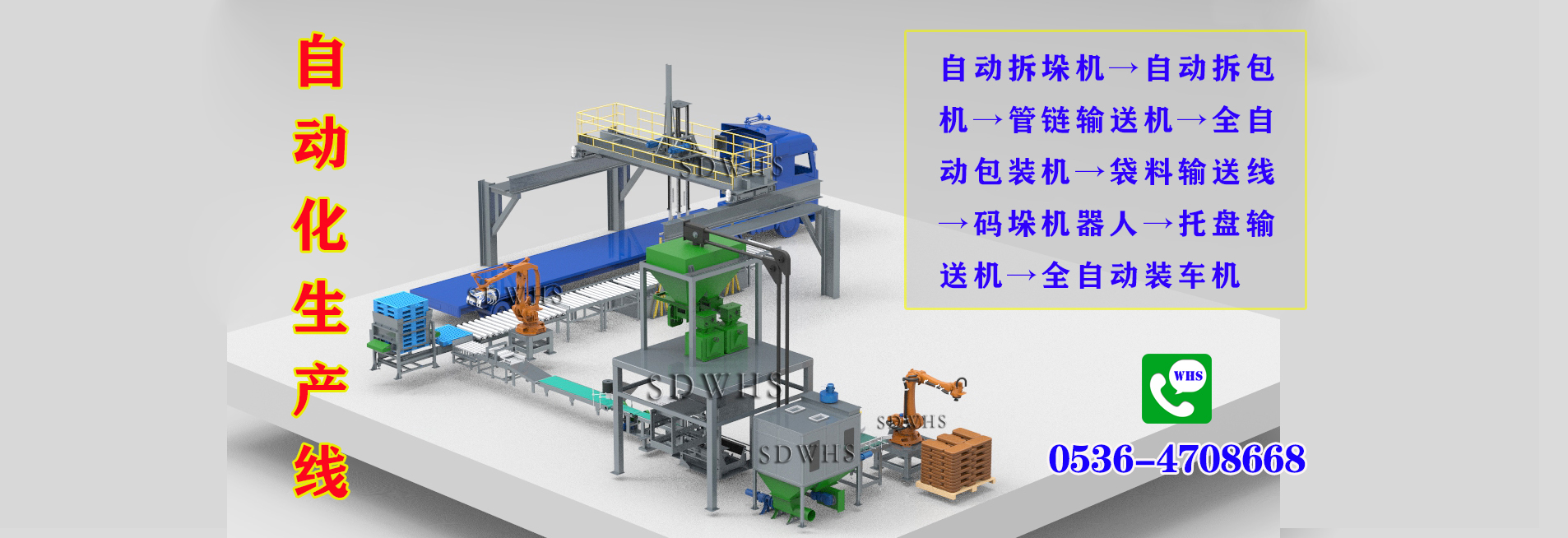
纸箱全自动码垛机主要由执行机构、驱动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
纸箱全自动码垛机的抓手主要有:
1、组合抓取式抓手 该类手抓适用于几个工作的协作抓放,采用几类手抓组合一起,同时满足多个工作码放。如:真空吸取式+抓取式组合机械手抓。
2、真空吸取式抓手 该类手抓主要适用于可吸取的码放物,吸盘吸取的码放物,如覆膜包装盒,听装啤酒箱,塑料箱,纸箱等。
3、夹板式抓手 该类手抓主要适用于箱盒码垛,主要用于整箱或规则盒装包装物品的码放,可用于各种行业。可以一次码一箱(盒)或多箱(盒)。
4、抓取式抓手 该类机械手抓主要用于袋装物的码放,如面粉,化肥,饲料,水泥等。
纸箱机器人...
移载码垛机
自动开箱、...
氧化铝砖自...
高位码垛机...
全自动码垛...
全自动装箱...














纸箱全自动码垛机主要由执行机构、驱动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
纸箱全自动码垛机的抓手主要有:
1、组合抓取式抓手 该类手抓适用于几个工作的协作抓放,采用几类手抓组合一起,同时满足多个工作码放。如:真空吸取式+抓取式组合机械手抓。
2、真空吸取式抓手 该类手抓主要适用于可吸取的码放物,吸盘吸取的码放物,如覆膜包装盒,听装啤酒箱,塑料箱,纸箱等。
3、夹板式抓手 该类手抓主要适用于箱盒码垛,主要用于整箱或规则盒装包装物品的码放,可用于各种行业。可以一次码一箱(盒)或多箱(盒)。
4、抓取式抓手 该类机械手抓主要用于袋装物的码放,如面粉,化肥,饲料,水泥等。