网站首页
关于伟豪思
产品中心
客户案例
资讯中心
视频中心
资质荣誉
联系伟豪思
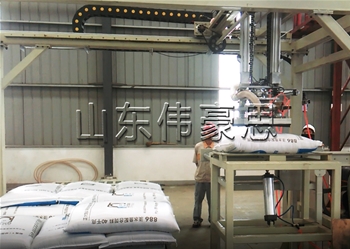
全自动拆垛拆包机器人
左右滑动查看更多图片
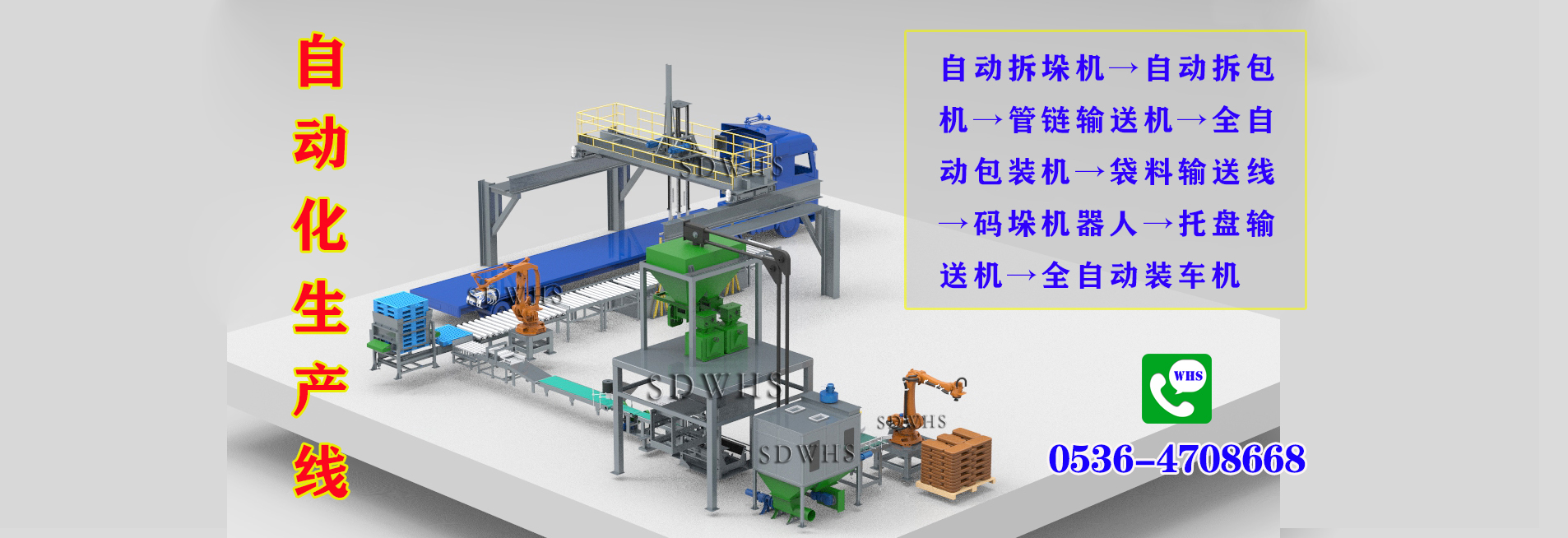
全自动拆垛拆包机器人工艺流程:
1、机器人携带3D视觉到达满垛盘正上方。
2、通过3D视觉识别出垛盘的形状和位置。
3、3D视觉把垛型的数据传递给机器人。
4、机器人按照3D视频传来的数据,来指导机器人进行运动。
5、机器人运动到产品的正上方,吸盘进行吸附。
6、机器人携带产品到拆包机的正上方,吸盘松气,产品自动掉落到拆包机内,拆包完成后再由机器人抓起放至废袋收集处。
差速拆垛机
自动桁架拆...
全自动拆垛...
自动拆垛机...
机械手拆垛...
机器人自动...
















全自动拆垛拆包机器人工艺流程:
1、机器人携带3D视觉到达满垛盘正上方。
2、通过3D视觉识别出垛盘的形状和位置。
3、3D视觉把垛型的数据传递给机器人。
4、机器人按照3D视频传来的数据,来指导机器人进行运动。
5、机器人运动到产品的正上方,吸盘进行吸附。
6、机器人携带产品到拆包机的正上方,吸盘松气,产品自动掉落到拆包机内,拆包完成后再由机器人抓起放至废袋收集处。