









肥料视觉拆垛机器人的工作流程
来源:本站时间:2021/3/2 9:22:56

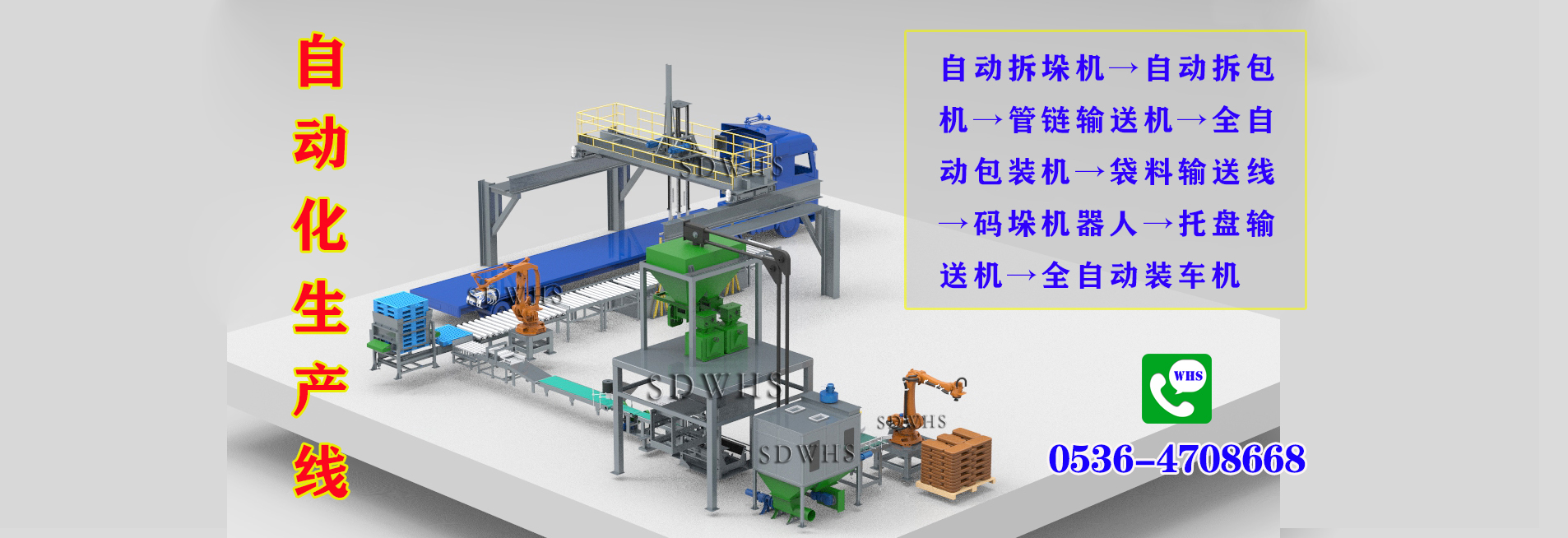
肥料视觉拆垛机器人采用工业机器人+深度摄像头+激光测距传感器检测技术组成的智能化拆垛设备,与传统的机器人拆垛机相比,它更能满足企业柔性制造的需求,那它是怎么完成智能化拆垛的呢?
人工使用叉车将一托盘物料放至托盘滚筒输送线,每段输送线都有到位检测传感器,检测到托盘物料到位后输送线停止;机器人携带3D视觉到达满垛盘正上方。通过3D视觉识别出垛盘的形状和位置。3D视觉把垛型的数据传递给机器人;机器人按照3D视频传来的数据,来指导机器人进行运动;机器人运动到产品的正上方,抓手进行抓取;机器人携带产品到输送线的正上方,松开抓手,产品自动掉落到输送线上,后进行进行装车或直接上料加工(如拆包)。
肥料视觉拆垛机器人的视觉识别算法可在无数据输入情况下,完成物料的位置识别,并有效规避扎带、打包带、胶带等对视觉系统的影响。
视觉拆垛机器人咨询热线:18105369038 宿 微信同号