









箱式码垛机器人解决控制精度低工作效率低的方案
来源:本站时间:2020/6/22 9:13:06

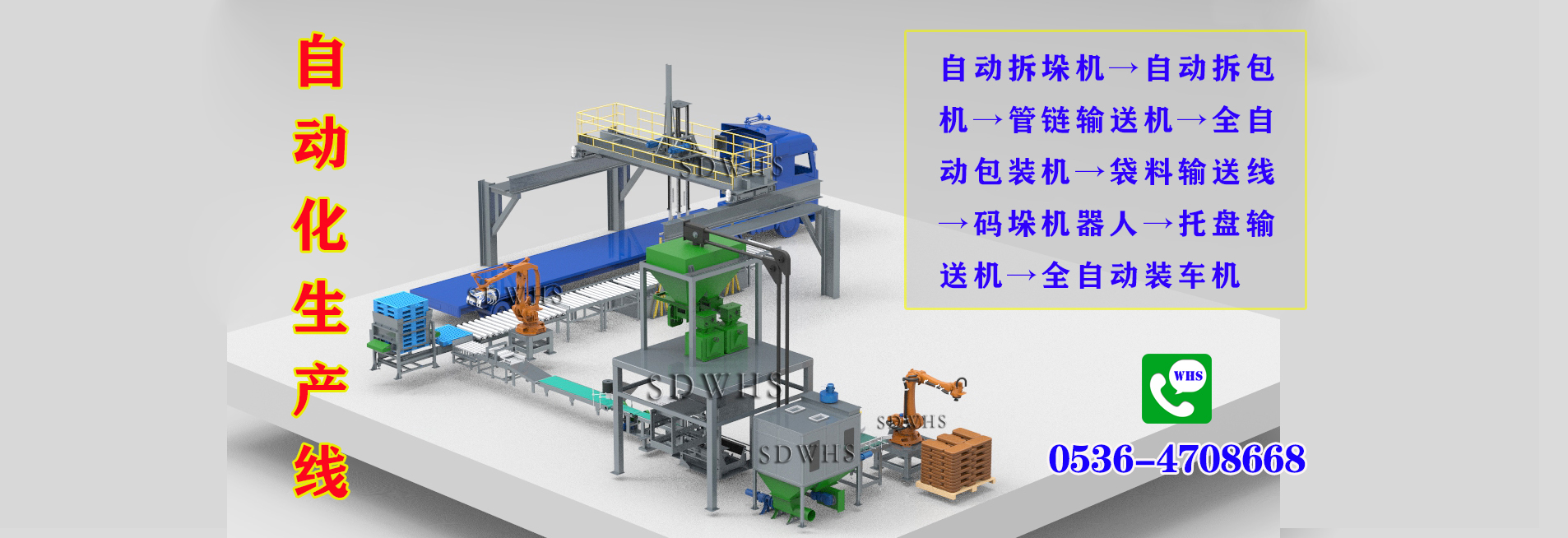
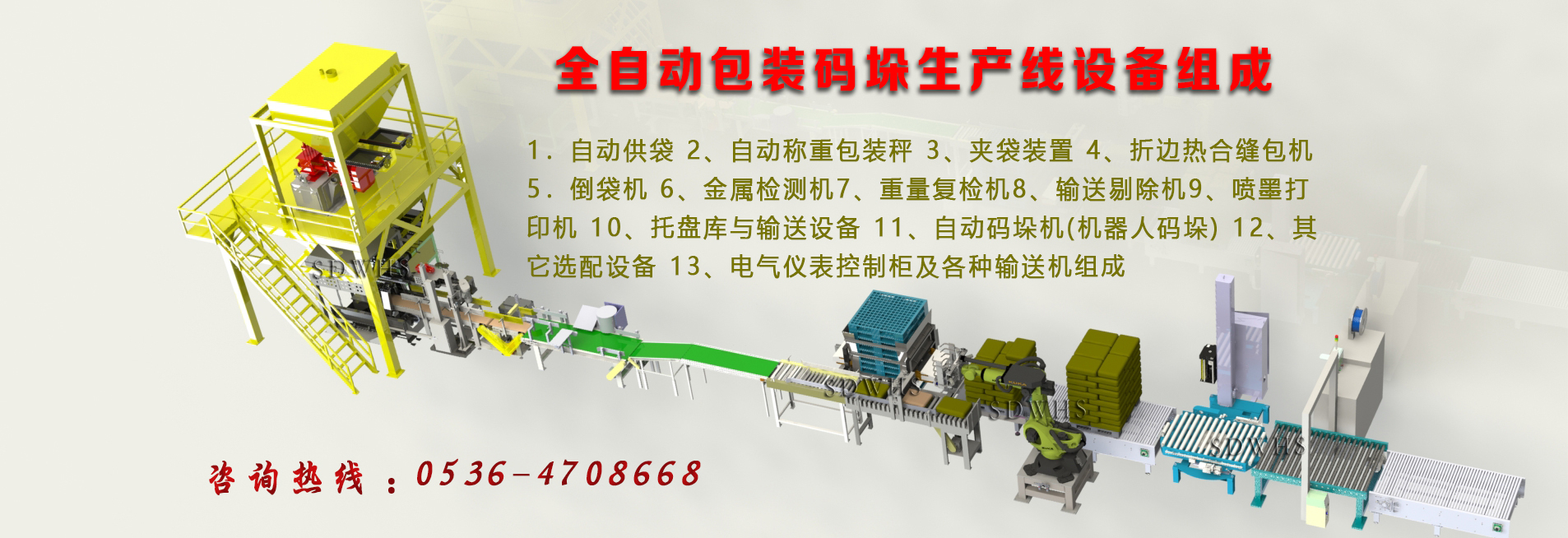
码垛机器人是一种模仿人手取料搬料码垛的机械设备,安装在生产线上,能够有效替代人工去进行码垛作业,如何解决现有技术存在的控制精度低、工作效率低等问题成为生产企业关心的问题,现有的解决性方案有:
1.自适应抓手
为了实际工作需要设计了一种具有自动检测、控制位置能力的码垛机器人自动抓手,如此一来,对于不同规格的物品,一种夹爪就可以满足抓取任务,减少了频繁更换夹具的流程,提高了码垛工作的效率。
2. 垛型设计
对于码垛机器人的摆放顺序,根据摆放的方向,层数,每层个数的需要,以由远到近,相邻摆放的原则设计摆放顺序可以缩短路径的总和,已达到提高码放效率的目的。
码垛机器人咨询热线:18105369038 宿 微信同号